【仪表网 研发快讯】在近日落幕的2025世界人工智能大会暨人工智能全球治理高级别会议(简称“WAIC2025”)上,由国家地方共建人形机器人创新中心发布的人形机器人“青龙Pro”正式亮相。作为合作生态伙伴,中国科学院合肥物质院智能所宋博研究团队,为青龙pro提供了基于相机和激光雷达感知的人形机器人三维空间占据栅格地图导航技术,显著提高其在室内外复杂环境中的三维感知能力,实现了高精度定点导航与动态避障功能。
青龙pro是国家地方共建人形机器人创新中心推出国内第一款全尺寸开源人形机器人的家族成员之一,采用双足结构,身高1.85米,体重85公斤。为进一步提高人形机器人的三维场景感知能力和导航避障功能,宋博团队提出了一种融合视觉语义与空间几何信息的三维栅格地图预测方法。该方法能够从单张RGB图像推断场景的完整3D语义占据图,即同时预测每个三维网格单元的几何占据状态和语义类别(如车辆、道路、建筑和行人等),并融合多种异源异构传感器数据,充分考虑室内外场景特征,实现了在复杂动态环境中的厘米级定位与安全平滑轨迹规划,提高了导航避障的鲁棒性与效率,确保人形机器人的安全运行。
值得一提的是,宋博团队此次成功地将Occupancy感知技术应用于人形机器人,突破传统的二维导航难以满足机器人在复杂室内外三维环境中灵活避障、群体协作的难题,在传统模型算法的基础上,团队基于实际人形机器人采集并制作了专用训练样本集,完成Occupancy模型的训练与优化。该模型在不低于10Hz的实时推理速率下,达到了超过80%的空间预测精度,兼顾高效率与低成本,为人形机器人理解真实的三维世界迈出了关键一步。
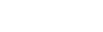
1. 三维栅格地图预测样本集制作流程图
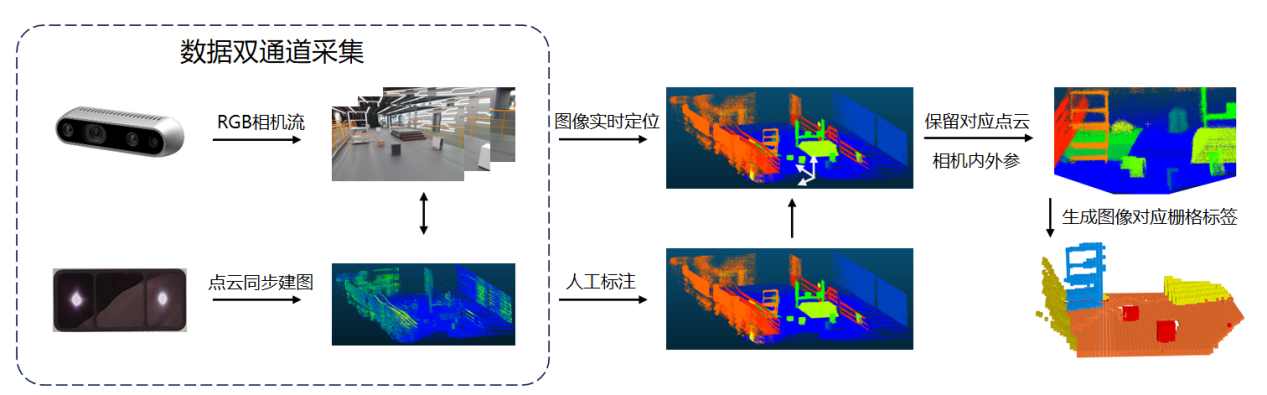
2. 室外剧烈运动情况下融合定位建图



















所有评论仅代表网友意见,与本站立场无关。