【仪表网 研发快讯】外骨骼机器人在下肢功能重建与助行方面具有广泛的应用前景。随着康复目标从“重获行走”向着“更自然、更日常、更贴身”发展,国内外相关研究团队正在积极探索如何在保留人体关节自由度的基础上,提供更加贴合人体运动规律的功能辅助。
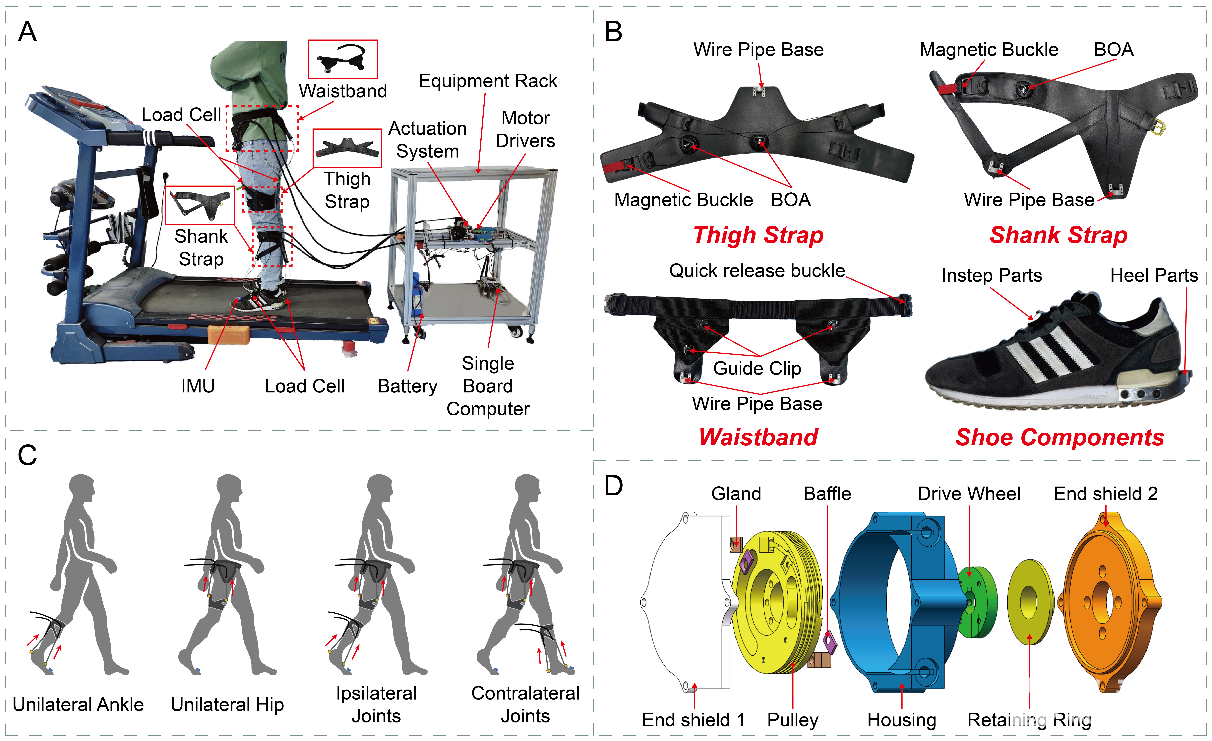
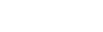
柔性外骨骼机器人系统:(A)系统构型与关键部件(B)柔性穿戴本体(C)模块化辅助配置(D)双向线轮执行器
近日,中国科学院沈阳自动化研究所机器人学研究室科研团队研制了一种模块化柔性下肢外骨骼机器人。其中,外骨骼柔性穿戴本体由皮革和织物等柔性材料制成,通过磁吸扣和BOA旋钮等快速调节装置实现简易穿戴与松紧调节。柔性本体还采用了模块化的设计,支持单侧踝、单侧髋、同侧髋踝、异侧髋踝四种辅助配置,可以根据使用者需求提供针对性的辅助。
以往柔性外骨骼常用单个电机驱动单一方向运动助力,这款外骨骼机器人以双向线轮执行器产生辅助力,采用分时复用策略,通过电机正反转分别驱动同一关节两个方向的运动,实现屈/伸(髋)或跖/背屈(踝)的双向助力,在降低硬件复杂度的同时保证了充足的输出能力。
科研团队在实验室环境下系统评估了模块化柔性外骨骼机器人在不同辅助配置下的表现。10名健康受试者佩戴便携式气体分析仪以测量净呼吸代谢,并在目标肌肉布置表面肌电电极以量化肌肉激活度水平。实验结果表明,该柔性下肢外骨骼机器人在单独或协同助力髋、踝关节时均表现出可靠的辅助效果,凸显其多构型适配与模块化优势,并能在多种配置下有效辅助步行运动。
该研究以Modular Soft Exoskeleton Design and Control for Assisting Movements in Multiple Lower Limb Joint Configurations为题发表于自动化与控制系统领域期刊IEEE Transactions on Automation Science and Engineering,沈阳自动化所副研究员张弼为该论文第一作者,谈晓伟副研究员、赵新刚研究员为通讯作者。该研究得到了国家自然科学基金项目和中国博士后科学基金会项目的支持。(机器人学研究室)




















所有评论仅代表网友意见,与本站立场无关。