西门子SIMATICHMIKP8/KP8F/32F 
SIMATIC HMI KP32F 和 HMI KP8 
空的前端 
空的前端 SIMATIC HMI 按键式面板 - 具有大号机械按键和多种颜色的照明灯(日光下可读),十分易于操作
- 接线和安装时间节省 60% 以上(即插即用)
- 与常规键盘式操作员面板相比,材料成本节约 30% 以上
- 2 个集成 PROFINET 端口(含交换机),用于设置总线型和环型拓扑
- 可自由组态的数字量 I/O 可在后面连接其他键控开关、指示灯等
- 可连接 KP8F 和 KP32F 的故障安全急停按钮或其它故障安全信号(SIL2 或 SIL3)
- 在功能上兼容所有标准 PROFINET 主站 CPU,也兼容非西门子 CPU
- KP8 及空白前端设计,还针对安装在防护等级为 IP65 的 IPC 扩展单元中进行了优化
- 可进行参数设置,极为灵活
- 采用空白前端设计,适合对灵活多样的操作员面板进行标准化组装
 西门子KP8F按键式面板 西门子KP8F按键式面板西门子日前发布面向工业自动化的HMI触摸屏——第二代有线移动面板。此面板的产品性能、灵活性和便捷性相较前代产品都全面升级。 
1.)新一代SIMATIC HMI移动面板的产品性能、灵活性和便捷性得以全面提升 2.)7寸或9寸高亮宽屏显示,显示面积增大40% 3.)创新的“紧急停止"按钮,轻松集成安全自动化 4.)紧凑型接线盒非常适用于小型设备电 话:(同号) 新一代SIMATIC HMI移动面板的产品性能、灵活性和便捷性得以全面提升第二代IP65操作面板适用温度范围广(0-45°C),且具有防尘、耐腐蚀和防水性的特性。这款兼具按键和触摸操作功能的面板,可通过Profinet集成至自动化解决方案,并可用TIA博途SIMATIC WinCC和创新的Style Editor进行组态。该面板采用标准更加严苛的工业设计,能承受zui高1.2米的跌落冲击,具备SIMATIC HMI精智面板的所有功能,它可用于配置同时适合静态和移动应用的操作显示画面。 
7寸或9寸高亮宽屏显示,显示面积增大40%第二代有线SIMATIC HMI移动面板采用高宽比为16:9的7寸或9寸高亮1,600万色宽屏显示,显示面积增加40%,可清晰呈现图像细节。此外,它的亮度还可调节,这意味着它能轻松适应不同的应用环境。 创新的“紧急停止"按钮,轻松集成安全自动化其他亮点包括*的“紧急停止"按钮。带停止/紧急停止按钮的移动面板配备了创新的按钮指示灯,该按钮指示灯只在移动操作面板与安全电路连接时才工作,满足当今用户对移动操作面板能够直观停止和安全紧急停止的功能需求。相比以前的型号,新一代移动面板的易用性也更强。譬如,面板把手上的三级确认按钮现在拥有两个清晰的触觉反馈点。 紧凑型接线盒非常适用于小型设备新的紧凑型接线盒占用空间只有以前产品的三分之一,可以直接安装在机柜上,因此特别适合占地面积小的小型设备。该接线盒只需用螺栓安装在机柜门的外面,然后再从里面连接所有电缆。长度在2到25米之间的坚固连接电缆,可确保操作员拥有足够的活动空间。新的移动面板还配备免维护储能系统,在操作员需要切换接线盒而断电时,它能在5分钟内让移动面板继续正常运行。 具有模块化设计,与采用分立部件相比,规划和组装工作量减少- 节约硬件成本:分布式 I/O,一个设备中组合有 2 个 PROFINET 接口和 I/O
- 可使用标准打印机(黑白或彩色)打印按键和灯的标签,防护等级为 IP65
- 灵活性高,可对颜色、开关/按钮功能和集成诊断功能进行任意组态
- 可针对过程对任何按键颜色进行动态调整
- 具有用于执行器和传感器的集成标准输入和输出,每个针脚都可用作输入或输出
- 空白前端设计为随后进行的系统扩展预留了空间,便于安装标准 22.5 mm 操作部件
- SIMATIC 人机面板系列中的功能与设计实现了匹配,例如,PRO 设备扩展单元中的功能与设计。
- “F”型号具有 SIL 2/3 安全等级,例如,可直接连接急停按钮
1.4 HMI侧的启停和给定设置

说明:
(1)给定的IO域连接到变量P2900对应于变频器参数P2900; (2)点击启动按钮---事件---点击---翻转变量位(InverBitInTag)---连接变量P2098_1 (对应
于变频器参数P2098[0])---选择第0位。
2 变频器侧的设置
2.1通信只需要设置CU的站地址 2.2 参数设置、起停和给定的连接逻辑见下图: 
变频器的参数连接为:电 话:(同号)
P1070[0]=P2900
P840[0]=r2094.0(其中r2094.0自动连接到P2098[0].0)
其它相关参数请参见S120调试手册。 
说明:P840[0]=r2094.0(r2094.0=P2098[0].0自动关联) 
说明:P1070[0]=P2900(P2900对应变频器内的可设置固定值,可通过HMI更改) 2.3 通信诊断和响应处理
变频器侧的通信诊断及通信故障响应逻辑见下图: 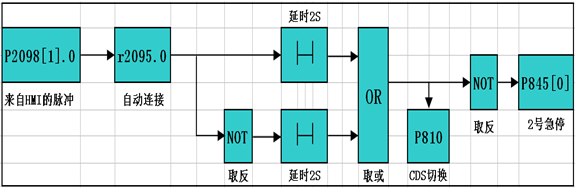
说明:
r2095.0是来自HMI的脉冲信号,检测该信号为常1或常0达到2S后,认为通信故障。
变频器OFF2停车,并切换命令参数组到端子或面板控制(由用户根据需要设置)。
2.4 变频器侧通信相关参数的设置
激活S120的自由功能块功能,方法如下:

说明:
(a) 右击“VECTOR_03”选属性---选择“function modules”---勾选自由功能块---OK。
(b) P20000[0]选择8*r20002。用于设置自由功能块执行组0的扫描时间,要求zui小为
1ms。参数形式为N*r20002,其中r20002为时基,对于驱动对象其值一般0.125mS。 (1)设置PDE0(延时通定时器),用于检测r2095.0的信号在2S内是否为常1。 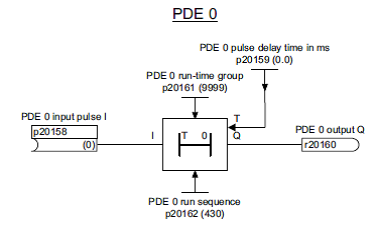
P20158= 2095.0(检测脉冲信号是否为常1)
P20161=0(选择执行组0)
P20162=1(在执行组0中的执行顺序为1)
P20159=2000(设定延时时间为2S)
r20160定时器0的输出,送给OR0输入1。 (2)设置NOT0功能块(对脉冲信号进行取反以检测常0信号) 
P20078=R2095.0(脉冲信号)
P20080=0(在执行组0中执行)
P20081=2(在执行组0中的执行顺序为2)
r20079(取反后的信号输出,送给PDE1输入) (3)设置PDE1(延时通定时器),用于检测r2095.0的信号在2S内是否为常0。 
P20163= R20079 (检测脉冲信号是否为常0)
P20166=0(选择执行组0)
P20167=3(在执行组0中的执行顺序为3)
P20164=2000(设定延时时间为2S)
r20165定时器1的输出,送给OR0的输入2 (4)设置OR0功能块(将常1和常0检测结果相或) 
P20046[0]= R20160 (常1检测结果)
P20046[1]= R20165(常0检测结果)
P20046[2]=0
P20046[3]= 0
P20048=0(在执行组0中执行)
P20049=4(在执行组0中的执行顺序为4)
R20047或信号的输出。该信号一方面直接送给P810用于切换命令组;另一方面送
给的输入。电 话:(同号)
(5)设置功能块,对检测结果取反后送给OFF2停车源2(P845[0]) 
P20082= r20047 (取自OR0输出)
P20084=0(选择执行组0)
P20085=5(在执行组0中的执行顺序为5)
r20083 的输出,送给OFF2停车源2(P845[0]) (6)zui终信号连接
P845[0]= R20083( 的输出信号)
P810= r20047(OR0的输出信号)
即当检测到通信故障时,变频器OFF2停车,以保证设备和人身安全;同时将命
令数据组2激活,若设置了其它命令数据组,则可避免因通信故障而导致变频器无
法运行。 在 HMI 上显示 Cam
当项目运行时,为了能在HMI上以图形方式显示项目中生成的Cam曲线,目前有一个方法实现此功能,就是调用功能块 FBGetCamValueForHMI 将Cam的位置轮廓显示在HMI上。 1.1 FBGetCamValueForHMI 功能块
在 simotion的程序单元中调用FBGetCamValueForHMI 功能块,还需要在 WinccFlexible中进行相关配置。
在调用 FB功能块前,Cam必须使用系统函数_interpolateCam 进行插补。
在HMI系统上显示的点数定义在数据常量 giNR_OF_SET_POINTS 中,从值保存在数组中,zui大的点数为 999,也就是说常量 giNR_OF_SET_POINTS 不能超过 999。如果改变此常量的默认值,需在WinccFlexible中必须进行相应的配置。
Cam图形在WinccFlexible中的输出是以线性类型来表示的。
功能块读出与固定主值相关的从值并且将它们写入到一个数组中。主轴距离由Cam的系统变量来计算 ("leadingrange.start"-"leadingrange.end") /NR_OF_SET_POINTS。系统功能块 _getcamfollowingvalue 用于读出从位置值。
注意:
由于可能会造成较高的系统负荷,所以建议此功能块在 motion task中调用。 1.2 调用FB
在插补生成 Cam曲线后,可以调用 FB 块。必须在WinccFlexible中设置趋势指针 Transfer1,它触发WinccFlexible中的Cam曲线显示。
"Trend Request" 指针在WinccFlexible中进行设置,指示当前显示的Cam。
示例: 调用FB 后,如果使用图像显示功能显示Cam曲线,则在simotion中创建指针变量:
• myTrendTransfer : 在HMI中设置的指针 "Trend Transfer1"
• myTrendRequest : 在HMI中设置的指针 "Trend Request" 1.3 在WinccFlexible中配置HMI
"cam display" 功能用于在WinccFlexible中显示Cam。一个 cam 需要一个 "cam buffer" , 在此数组中填入FB的 INOUT变量 "SlaveValues" 。此外,Cam显示必须通过一个指针触发。 1.4 FB的输入/输出接口
表 1-1: FBGetCamValueForHMI 参数描述 | 名称 | 参数类型 | 数据类型 | 描述 | | cam | IN | CamType | 被显示的Cam | | camType | IN | EnumCamPositionMode | 显示带或不带比例缩放(BASIC / ACTUAL) | | slaveValues | IN/OUT | aSlaveCamValue | 决定从位置的数组 | | minSlaveValue | OUT | REAL | 从位置的开始值 | | maxSlaveValue | OUT | REAL | 从位置的结束值 | | minMasterValue | OUT | REAL | 主位置的开始值 | | maxMasterValue | OUT | REAL | 主要位置的结束值 | | 注: 参数类型 IN = 输入参数,OUT = 输出参数,IN/OUT = 输入/输出参数 |
1.5 LAD 示意图 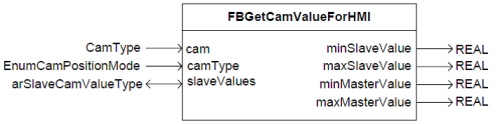
图1: FBGetCamValueForHMI 的LAD示意图
2 功能块的调用编程及HMI设置 在用户项目中,该功能是用于在触摸屏上显示Cam曲线。
2.1 Simotion中创建Cam
首先要创建Cam: 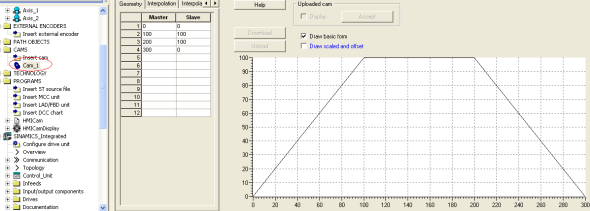
图2: 创建Cam曲线
2.2 Simotion中Cam显示功能块的编程
(1) 导入FBGetCamValueForHMI 功能块
右键点击项目导航中的“Program”,在弹出的菜单中选择“Imporrt external source-ST source file”导入功能块源文件: 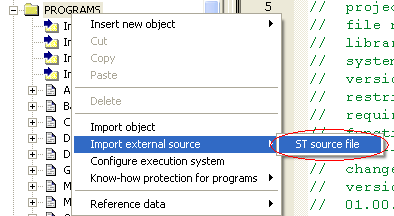
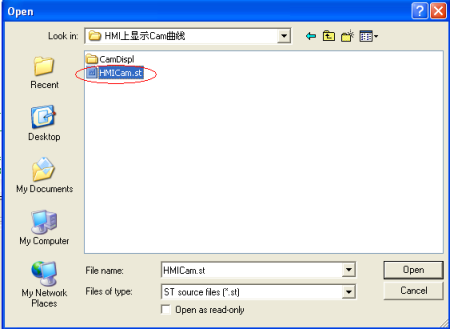
图3: 导入ST源文件
(2) 创建程序单元及全局变量 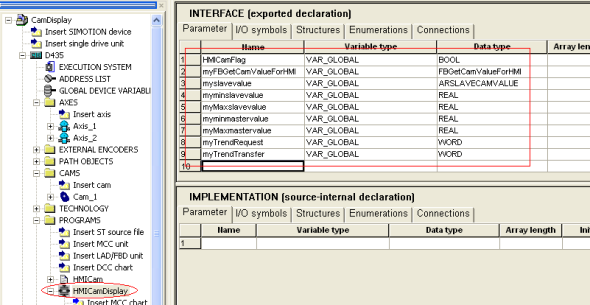
图4: 创建全局变量
(3) 在HMICamDisplay程序单元中连接功能块程序单元 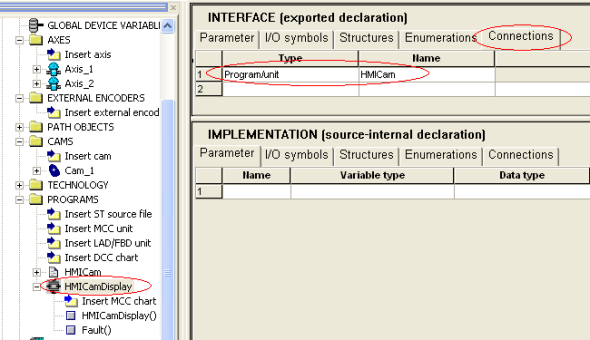
图5:连接调用的程序单元
(4) 用MCC语言编辑Cam曲线显示程序(调用功能块FBGetCamValueForHMI) 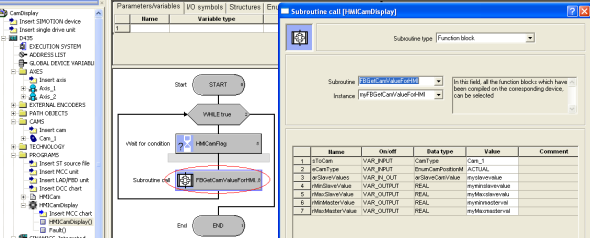
图6:连接调用的程序单元
(5) 将程序分配到simotion系统执行级中 
图7: 程序分配
2.3 WinccFlexible中HMI设置
在HMI中使用了一个特殊的方法,即在控件TrendView中显示数组曲线的方法来实现Cam曲线的显示:
(1) 建立simotion与HMI的连接电 话:(同号) 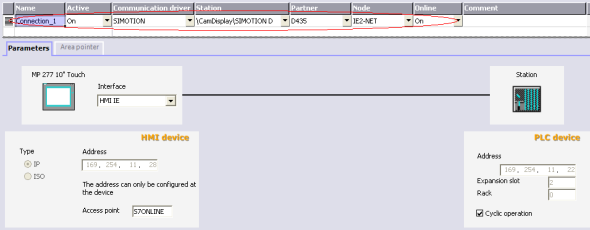
图8: 建立simotion与HMI的连接
(2) 创建HMI变量
仅用于显示Cam曲线的变量Tag有: 
这些变量在SIMOTION中已创建。其中myslavevalue为Cam曲线数据,而mytrendrequest以及mytrandtransfer用于控制HMI什么时候读取Cam曲线。
注意:
设置myslavevalue的访问方法为cyclic continuous或on_command: 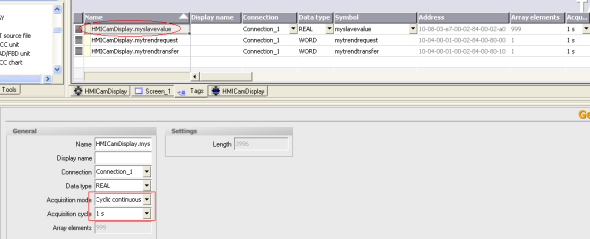
图9: 设置myslavevalues的访问方法为cyclic continuous
(3)在HMI上插入一个显示趋势图控件TrendView
在其属性->Properties->Trend中设置如下: 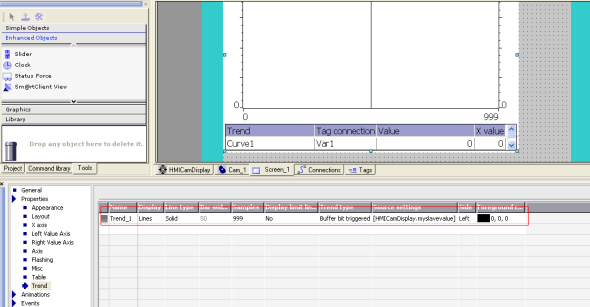
图10: 趋势图设置
其中Samples的数量与FBGetCamValueForHMI中获取的点数相同,在Source settings中设置如下: 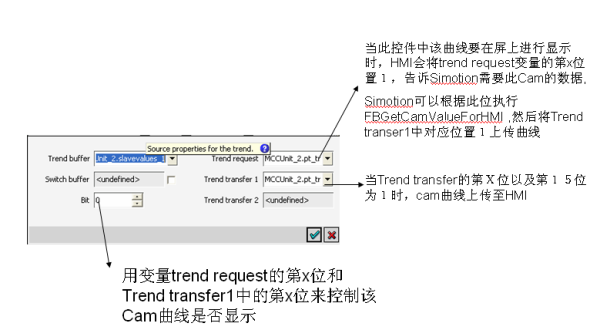
图11: 趋势图设置
(4) 运行测试
完成后运行屏,显示曲线画面后,myTremdrequest第0位置1: 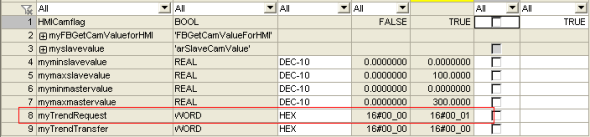
图12: 运行测试
将myTrendtransfer设为H8001后,即将第0,15位置1后,曲线上传至HMI: 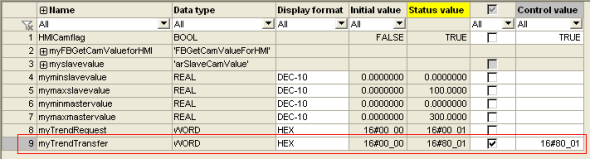
图13: 运行测试
在屏上显示Cam曲线: 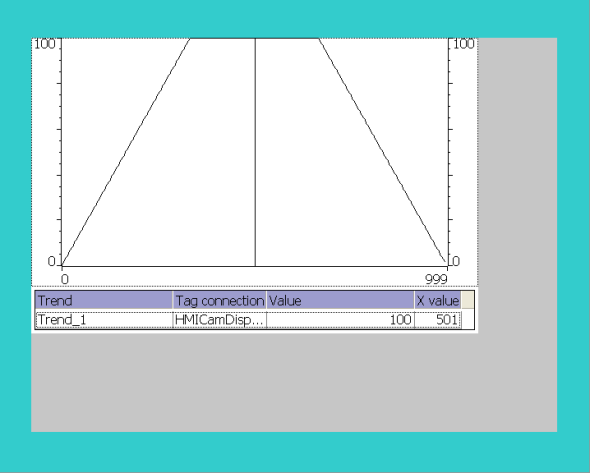
图14: 运行测试
3 示例程序 概况:
在没有PLC的情况下,通过西门子组态软件WinCC Flexible,可以实现SINAMICS S120和屏的直接通讯。那么不通过PLC,如何在HMI设备上直接显示SINAMICS S120的故障或报警信息?本文以CU320 和MP270间的通讯为例介绍。 系统环境:Windows XP Professional SP3 English Edition
软件环境:Step 7 V5.4 + SP5;WinCC Flexible 2008;Scout V4.1.5
硬件信息:PG/PC;CU320;双轴电机模块;MP270
网络拓扑结构: 
图1 网络拓扑图
Profibus DP 网络地址:
CU320 :4
MP270 :1电 话:(同号)
工业以太网地址设定:
PG/PC :192.168.0.88
MP270 :192.168.0.11
CU及驱动的装置号(如图2所示): 
图2 装置号
S120驱动器的调试过程请参考其他文档,在完成驱动器的基本调试后,才能进行以下的工作。 2. WinCC Flexible配置 STEP1:打开STEP 7 软件,插入一个HMI Station。 
图3 插入HMI站
STEP2:选择相应的屏和版本。 
图4 选择屏的型号
如果版本不对,可通过OS更新来达到*。 
图5 OS更新
STEP3:打开WinCC Flexible,建立新的连接: 
图6 通讯连接设定
STEP4:建立变量: 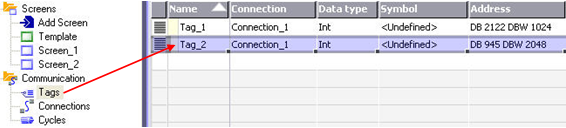
图7 新建变量
变量地址的设定规则如下:
DB := 参数号
DBx := 1024*装置号 + 参数下标
其中,x可为W或D,根据S120参数的数据类型而定。装置号参见图2。
如果要在屏上显示故障或报警信息,可通过读取相应的参数来实现。
举例说明: 1. 显示CU的报警代码Alarm Code,参数为r2122.0 ~ r2122.63。其中,r2122.0~r2122.7存储的是当前出现的报警代码,如果被确认复位后,则被存储在r2122.8 ~r2122.15 中,依次向后类推直至r2122.56 ~ r2122.63。如果希望进一步获得报警值,可读取参数r2124.0 ~ r2124.63。与r2122.0 ~ r2122.63是一一对应的。
建立变量,变量地址为DB2122.DBW1024,数据类型:Int;其中DBW中的1024 = 1024*1(装置号)+ 0 (参数下标) 2. 显示驱动器的故障代码Fault Code,参数为r945.0 ~ r945.63。其中,r945.0~r945.7存储的是当前出现的故障代码,如果被确认复位后,则被存储在r945.8 ~r945.15 中,依次向后类推直至r945.56 ~ r945.63。如果希望进一步获得故障值,可读取参数r949.0 ~ r949.63。与r945.0 ~ r945.63是一一对应的。
建立变量,变量地址为DB945.DBW2048,数据类型:Int ;其中DBW中的2048 = 1024*2 (装置号)+ 0 (参数下标)。 STEP5:进行屏组态数据下载的设置: 
图8 下载方式设置
STEP6:设定PG/PC的IP地址,与屏在同一网段: 
图9 PG/PC的IP地址设置
STEP7:组态屏来显示S120的故障、报警信息,建立与S120的直接通讯连接,并下载屏的组态数据。 概述电 话:(同号)
本文以 TP270与SIMOTION D435连接为例,介绍了SIMOTION D435与HMI如何进行硬件组态、变量连接、报警信息的建立。
HMI人机界面可以通过PROFIBUS或者Ethernet与SIMOTION 进行连接通讯。通过SIMOTION 设备中工艺对象的变量表、系统变量表及用户定义的全局变量表可实现SIMOTION 设备与HMI操作面板间进行数据交换。
可用于与SIMOTION 连接的HMI操作面板如下表1所示: 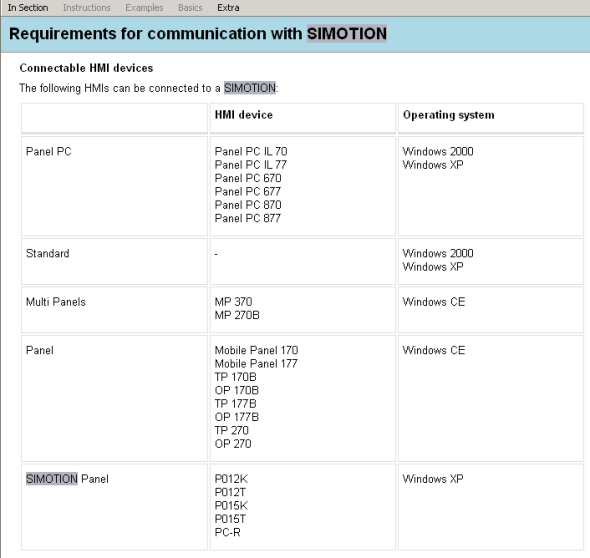
表1. 可与SIMOTION 连接的HMI操作面板
可以用Winccflexible,ProTool/Pro来进行配置
二、系统配置:
1. 一台插有CP5511 或CP5512的计算机(装有 SIMATIC S7 V5.4、SCOUT V4.0、ProTool/Protool CS V6.0+SP3、ProTool/Pro RT V6.0+SP3或Winccflexible)
2. HMI (TP270 ) 及用于TP270的直流24V电源
3. 一台 SIMOTION D435Demo设备
4. ProfiBus 总线及连接器(连接于TP270的 1FB1(DP)口及SIMOTION的DP口)
三、SIMOTION网络地址的设定
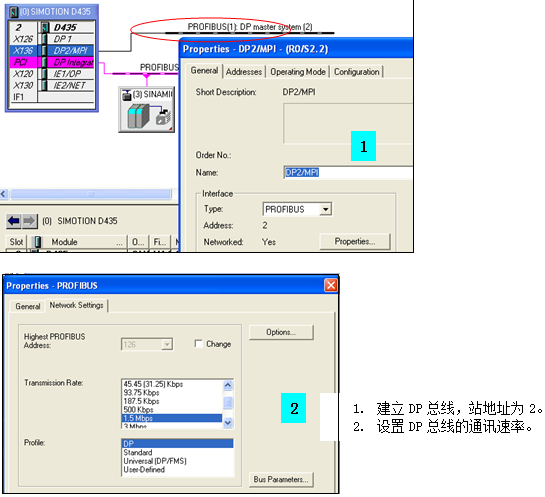
图1.
四、PG/PC的设置
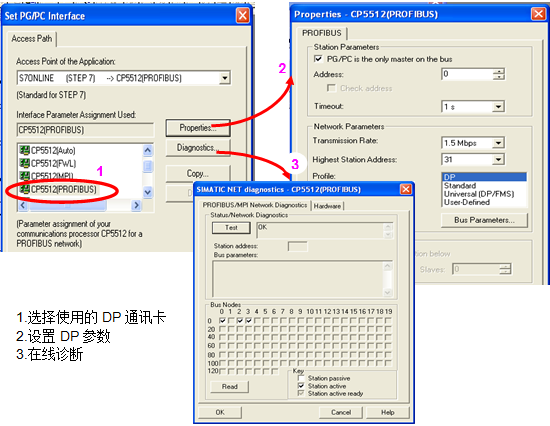
图2.
五、ProTool中的项目配置
1.将HMI 项目集成到Step7中,钩上“ ProTool Intergration inStep7 前面的 ”√“即可 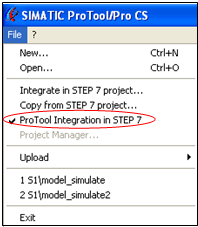
图3.
2. 在STEP7中打开项目,插入OP站 
图4.
双击插入后的OP站
3. 正确选择使用的 HMI

图5.
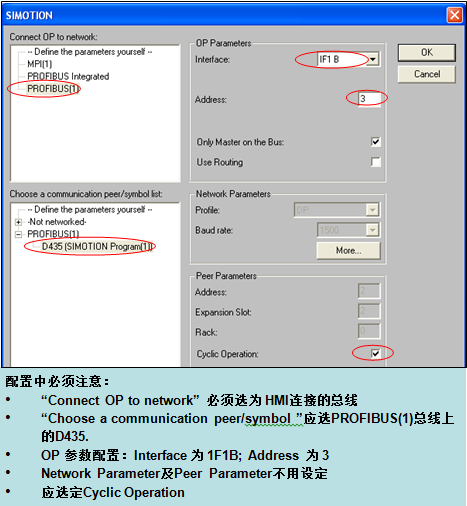
图6.
电 话:(同号) 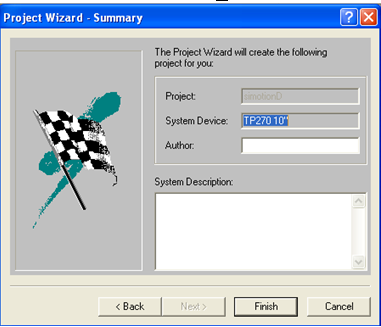
图7.
4. HMI项目下载端口设置
HMI项目下载需校核下载端口,本 Demo 中使用 TP270 的 DP 口,因 此设置如下: 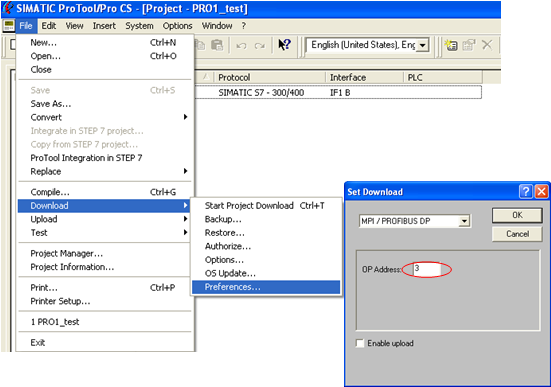
图8.
六、SIMOTION中变量的定义
SIMOTION中配置的如下变量才能在HMI中被应用:
1.程序unit中配置的全局变量(图9)。
2.在“I/O ”中定义的变量(图10)。
3.在“GLOBAL DEVICE VARIABLES”中定义的变量(图11)。 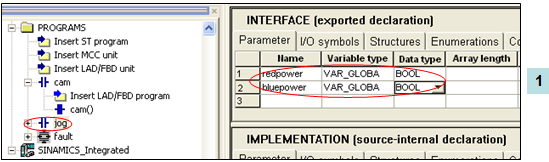
图9.
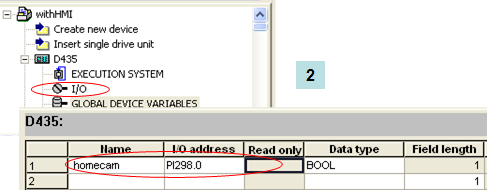
图10.
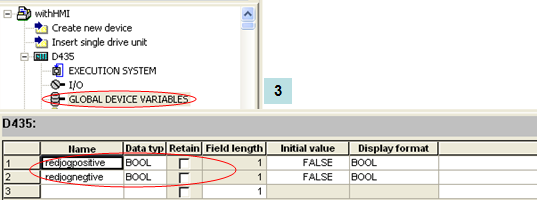
图11.
七、HMI中变量的定义
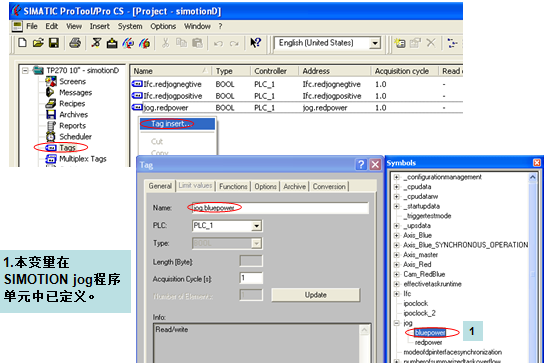
图12.
在HMI中新建变量时,会自动弹出SIMOTION中变量表,选择所需变量即可。
八、HMI中位扫描报警方式的配置
用于在HMI系统中显示机器的故障或状态信息, HMI通过扫描报警位,显示报警信息。
1.报警信息区域指针的建立 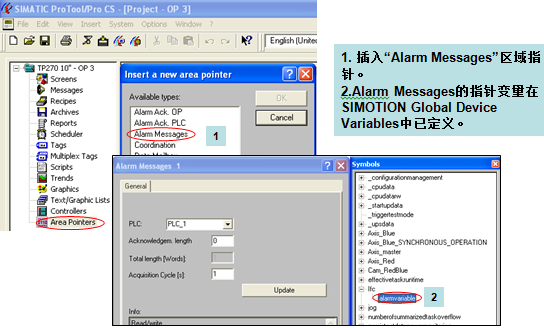
图13.
2.报警消息的建立 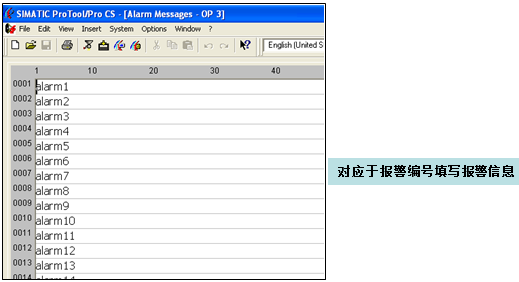
图14.
九、Alarm_S报警方式配置
用于在HMI系统中显示机器的故障或状态信息, 可分级显示报警信息。HMI不扫描报警位,报警信息的显示通过在SIMOTION中编程触发,这种报警方式可不占用HMI的总线通讯资源。
HMI侧配置
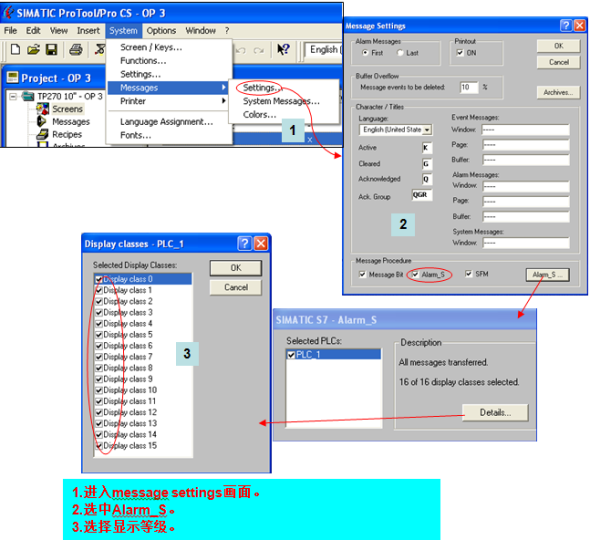
图15.
HMI侧报警信息窗口配置 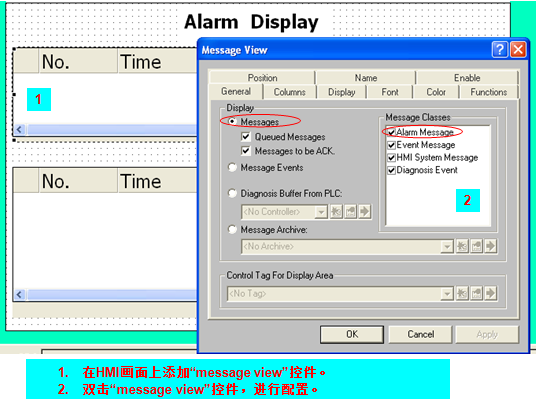
图16.
1. SIMOTION侧配置 
图17.
2. SIMOTION侧编程
(1)通过调用系统函数,如图18所示,来实现SIMOTION中报警信息的编程触发。 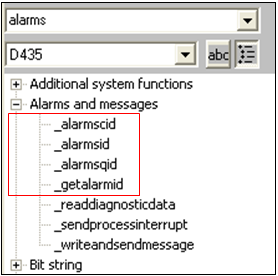
- 由于前端平滑而坚固,非常适合绝大多数市场领域(汽车、食品与饮料、石油与天然气等),甚至可在危险区域使用(请参见技术数据)
- 接线很少,操作直观、快速,十分方便
- 按键中具有多种颜色的 LED 灯,可不通过语言提供反馈信息,即使在阳光下也能读取
- 内置型面板可进行扩展,无需使用切割工具
- 灵活性高,适合机器制造
- SIMATIC HMI 按键式面板 – 空白前面板设计
电 话:(同号)- 可以使用安装架简便安装
- 采用坚固的设计,适用于恶劣的工业环境
- 可安装 22.5 mm 标准部件
- 标准 22.5 mm 操作部件安装方便,便于在运行期间进行改装
SIMATIC HMI 按键式面板 – 基本功能 - 光滑的前端,易于清洁
- 可对大号机械带照明按钮单元进行编程,以作为开关或按钮使用
- 24 VDC 回路电源,无需附加端子
- 两个 PROFINET 接口,非常适合总线型操作
- 采用介质冗余协议 (MRP),适合环网运行,即使在 PROFINET 电源电缆断开的情况下,也可正常运行
- 输入和输出位于后部,每个针脚都可用作输入或输出
- F 型号还配备有 SIL 2/3 输入
SIMATIC HMI KP8 PN - 8 个带机械照明的大号按钮具有良好的触觉反馈,因此也适合在恶劣的工业环境中使用。
- 8 个可自由组态的数字量 I/O
- 用于标准型 CPU
SIMATIC HMI KP8F PN - 具有额外的数字量故障安全输入,用于连接单通道或一个双通道传感器(例如,用于急停)
- 用于故障安全 CPU
SIMATIC HMI KP32F PN - 32 个带机械照明的大号按钮具有良好的触觉反馈,因此也适合在恶劣的工业环境中使用。
- 16 个可自由组态的数字量 I/O
- 具有额外的数字量故障安全输入,用于 4 个单通道或 2 个双通道传感器(例如,用于急停)
- 用于故障安全和标准型 CPU
演示箱 SIMATIC HMI 按键式面板 – 低成本演示和实验箱 该箱包含一个用于 1211C CPU的 KP8(含演示程序),放置在一个随时备用的小型有机玻璃支架上。 - 内容:
- 1x 箱
- 1x KP8 PN
- 1x CPU1211C
- 1x 支架,固定接线,包括程序
- 可通过一个标准的便携式 PC 电源适配器供电(电源适配器不在供货范围内)
根据要求提供价格与交货时间 -
| 





















