
【仪表网 研发快讯】10月3日,机械学院黄永安教授、张帆副研究员联合澳门大学助理教授钟俊文、武汉理工大学李军锋副教授在“Nature Communications”发表题为“AI-embodied multi-modal flexible electronic robots with programmable sensing, actuating and self-learning(具身智能可编程感知、驱动与自学习的多模态柔性电子机器人)”的研究论文。该论文提出了一种模块化柔性电子机器人开发框架,通过紧密集成的传感、驱动与决策架构,最终赋予机器人更高级的环境智能。李军锋为本文的第一作者,黄永安、张帆、钟俊文为本文共同通讯作者。
高运动性与具身智能是小型软体机器人实现自主功能的核心基础,对于需在非结构化环境中完成自适应交互的应用场景尤为关键。目前,软体机器人已发展出包括爬行、跳跃与滚动在内的多种运动模式,在操作安全性与环境兼容性之间取得了良好平衡。然而,在面对自主搜救、动态地形导航等复杂任务时,现有系统仍存在明显局限。昆虫等生物通过感知与运动系统的高度融合展现出卓越的环境适应性,但大多数机器人系统仍受限于预设的运动模式,且动态环境下的实时响应能力仍是当前亟待突破的瓶颈。
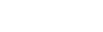
针对上述挑战,该研究提出了一种新型柔性电子机器人(FEbots),其创新性地融合了模块化架构与振荡驱动机制。与传统机器人需独立控制腿部运动轨迹不同,FEbots采用分布式刚毛阵列,在简化驱动系统的同时,仍保持优异的环境适应能力。通过调节刚毛密度与电路布局等模块化重构手段,机器人能够在不同构型间灵活切换,以适应多样化的任务需求。此外,结合柔性电子技术赋予机器人多维度环境感知能力,实现视觉、接近觉、温湿度等多种传感器与端侧处理单元协同工作。该创新设计为开发适用于动态环境的自主软体机器人构建了全新的技术框架。突破性地融合软体机器人与柔性电子两大领域,通过组装柔性电子模块与仿刚毛运动模块,研发出柔性电子机器人(FEbot)。该技术实现了柔性电子器件的运动能力突破,同时赋予机器人更强的智能特性。机器人具备完全自由的活动柔性,且功能得到显著增强。采用模块化设计理念,通过乐高式组装可定制典型柔性电子机器人构型,使其具备卓越的环境适应性(平滑/粗糙地面、楼梯、水下、垂直管道等)、多模态运动能力(前进/后退、旋转、横向移动)与多模态感知功能(视觉、温湿度、接近觉及路径形态识别)。基于低功耗超维计算方法,植入具身人工智能的柔性电子机器人实现了高度自主性(自主危险规避、协同避障的温场追踪等),从而能有效应对动态非结构化环境。
具身智能柔性电子机器人。a) FEbot示意图;b) FEbot实物样机;c) FEbots自主感知-认知-驱动与物理世界交互;d) FEbots性能比较。
该研究获国家自然科学基金和中国原子能科学研究院,澳门特别行政区科技发展基金资助。




















所有评论仅代表网友意见,与本站立场无关。